Zlata Jelačić uskoro bi na Mašinskom fakultetu u Sarajevu trebala odbraniti doktorsku disertaciju „Doprinos dinamičkom modeliranju i upravljanju rehabilitacionih robota kroz razvoj aktivne hidraulične natkoljenične proteze“ pod mentorstvom prof. dr. Remze Dedića i prof. dr. Safeta Isića.
Ova naučnica je svoje dugogodišnje iskustvo i obrazovanje stečeno na Mašinskom fakultetu Tehničkog univerziteta u Ajndhoven u Holandiji, gdje je magistrirala, Mašinskom fakultetu u Sarajevu, gdje trenutno predaje kao viši asistent, Elektrotehničkom fakultetu u Sarajevu, gdje je završila doktorski studij iz automatike i elektronike, te Medicinskom fakultetu, koji upisuje zbog stjecanja znanja iz anatomije, usmjerila ka revolucionarnom doprinosu razvoju aktivnih natkoljeničnih proteza.
Kako Jelačić ekskluzivno otkriva za „Dnevni avaz“, ona je kroz ovu doktorsku disertaciju dala značajan doprinos daljnjem razvoju i budućoj komercijalizaciji natkoljenične proteze koja bi u budućnosti trebala nadomjestiti gubitke ljudima bez donjih ekstremiteta.
- Istraživanje i razvoj natkoljenične proteze počeli su još 2000. godine na Fakultetu strojarstva, elektrotehnike i računarstva Sveučilišta u Mostaru, pod vodstvom prof. dr. Dedića i prof. dr. Vučine. Od početka, fokus je bio na rješavanju problema penjanja na stepenice osoba s natkoljeničnom amputacijom, koji je do danas neriješen u slučaju komercijalnih proteza. Razlog je što kod osoba s natkoljeničnom amputacijom, pored nedostatka stopala i velikog broja mišića koji su neophodni za hod i penjanje na stepenice, nedostatak pogonjenog koljena i gležnja predstavlja značajan problem, posebno kod penjanja na stepenice – pojašnjava Jelačić.
Ranija istraživanja, kako kaže, pokazala su da je nedovoljno da se riješi samo aktuacija zgloba koljena.
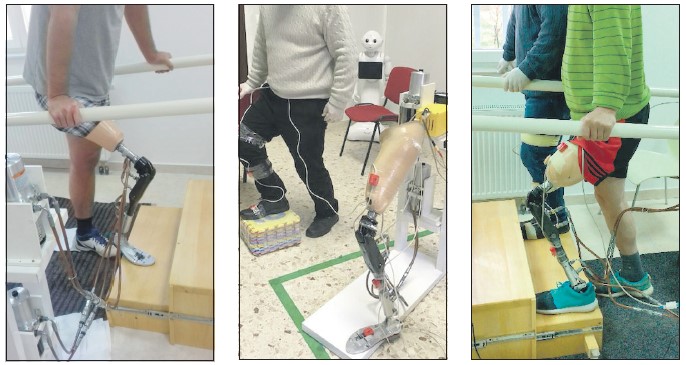
- Rezultat moje doktorske disertacije je radni prototip aktivne natkoljenične proteze s odvojenim hidrauličnim pogonom u zglobovima koljena i gležnja. Hidraulika se koristi zbog velikih sila i momenata koje treba savladati pri penjanju na stepenicu. Prototipom se upravlja očitovanjem signala sa zdrave noge u realnom vremenu. Rezultati istraživanja su pokazali da je kroz dizajn elektronike i odgovarajućeg upravljanja postignuta fina regulacija pokreta i penjanje koje je približno onom biološkom – ističe Jelačić.
Velika motivacija
Eksperimenti s osobama s natkoljeničnom amputacijom izvedeni su u ortopedskom laboratoriju u Mostaru pod nadzorom ortopeda Nihada Subašića.
- Izrazi lica ljudi koji su ovu protezu isprobali dovoljna su motivacija da sve ovo izguramo do kraja. Njihova iskustva velika su nam motivacija, odlična je povratna informacija od osoba s amputacijom. Vidjeli su nadu u ovom projektu – kaže Jelačić, budući doktor tehničkih nauka iz oblasti mašinstva.
Palermo i Ajndhoven
Tokom razvoja proteze ostvarena je saradnja s Univerzitetom u Palermu u Italiji.
- U laboratoriji za robotiku Univerziteta u Palermu, na čijem je čelu prof. dr. Antoni Kela (Chella), izveden je veći dio eksperimentalnih istraživanja. Također, Tehnički univerzitet u Ajndhovenu zainteresiran je za saradnju na daljnjem razvoju i komercijalizaciji proteze – kaže Zlata Jelačić.